This article was published as a part of the Data Science Blogathon
Introduction
From this article, you will learn how to play Super Mario Bros with Deep Q-Network and Double Deep Q-Network (with code!).

Photo by Cláudio Luiz Castro on Unsplash
Super Mario Bros is a well-known video game title developed and published by Nintendo in the 1980s. It is one of the classical game titles that lived through the years and need no explanations. It is a 2D side-scrolling game, allowing the player to control the main character — Mario.
The gameplay involves moving Mario from left to right, surviving the villains, getting coins, and reaching the flag to clear stages. Mario would ultimately need to save the princess toadstool. These come with different reward systems, coins, villains, holes, and completion time.
The game environment was taken from the OpenAI Gym using the Nintendo Entertainment System (NES) python emulator. In this article, I will show how to implement the Reinforcement Learning algorithm using Deep Q-Network (DQN) and Deep Double Q- Network (DDQN) algorithm using PyTorch library to examine each of their performance. The experiments conducted on each algorithm were then evaluated.
Data understanding and preprocessing
The original observation space for Super Mario Bros is 240 x 256 x 3 an RGB image. And the action space is 256 which means the agent is able to take 256 different possible actions. In order to speed up the training time of our model, we have used the gym’s wrapper function to apply certain transformations to the original environment:
- Repeating each action of the agent over 4 frames and reducing the video frame size, i.e. each state in the environment is a 4 x 84 x 84 x 1 (a list of 4 continuous 84 x 84 grayscale pixel frames)
- Normalizing the pixel value to the range from 0 to 1
- Reducing the number of actions to 5 (Right only), 7 (Simple movement) and 12 (Complex movement)
Theoretical Results
Initially, I am thinking to perform an experiment using Q-learning which uses a 2-D array to store all possible combinations of state and action pair values. However, in this environment setting, I realized that it is impossible to apply Q-learning as there is a requirement to store a very large Q-table and this is not feasible.
Therefore, this project used the DQN algorithm as the baseline model. DQN algorithms use Q- learning to learn the best action to take in the given state and a deep neural network to estimate the Q- value function.
The type of deep neural network I used is a 3 layers convolutional neural network followed by two fully connected linear layers with a single output for each possible action. This network works like the Q-table in the Q-Learning algorithm. The objective loss function we used is Huber loss or smoothed mean absolute error on Q-values. Huber loss combines both MSE and MAE to minimize the objective function. The optimizer we used to optimize the objective function is Adam.
However, the DQN network has the problem of overestimation.
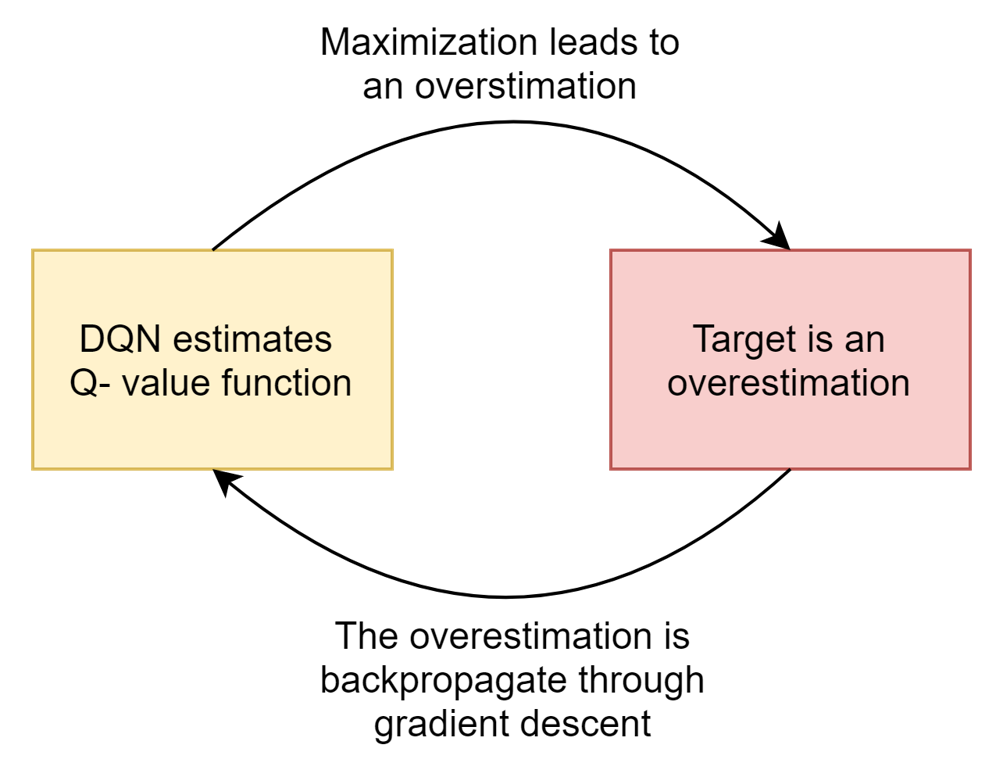
Figure 1: Illustration of how the DQN network is overestimated
There are 2 main reasons for overestimation as shown in Fig1. The first reason is due to the maximization function used to calculate the target value. Let’s assume the True action-values are denoted by: x(a₁) … x(aₙ). Noisy estimations made by DQN are denoted by Q(s,a₁;w), … Q(s, aₙ;w) Mathematically,

therefore it is an overestimation over true Q-value.
The second reason is that overestimated Q-values are again being used to update the weights of the Q-Network through backward propagation. This made overestimation more severe.
The main drawback of the overestimation is due to non-uniform overestimation done by DQN. The intuition is that the more frequent a specific state, action pairs appear in the replay buffer, the more overestimation is done on that state-action pairs.
To obtain a more accurate Q-value, we would like to use the DDQN network on our problem then compare the experiment result against the previous DQN network. To alleviate the overestimation caused by maximization, DDQN uses 2 Q-network, one for getting actions and another for updating the weights through backpropagation. The DDQN Q-learning update equation is:

Q* is the one for updating weight and Q^ is the one for getting actions for a specific state. Q^ simply copies the values of Q* every n step.
Experiment Results
There were 5 experiments conducted based on different movements of the agent using 2 algorithms, DQN and DDQN. The different movements are complex movements, simple movements, and right-only movements.
The parameters settings are as follows :
- Observation space: 4 x 84 x 84 x 1
- Action space: 12 (Complex Movement) or 7 (Simple Movement) or 5 (Right only movement)
- Loss function: HuberLoss with δ = 1
- Optimizer: Adam with lr = 0.00025
- betas = (0.9, 0.999)
- Batch size = 64 Dropout = 0.2
- gamma = 0.9
- Max memory size for experience replay = 30000
- For epsilon greedy: Exploration decay = 0.99, Exploration min = 0.05
At the beginning of exploration, max = 1, the agent will take random action. After each episode, it will decay by the exploration decay rate until it reaches an exploration min of 0.05.
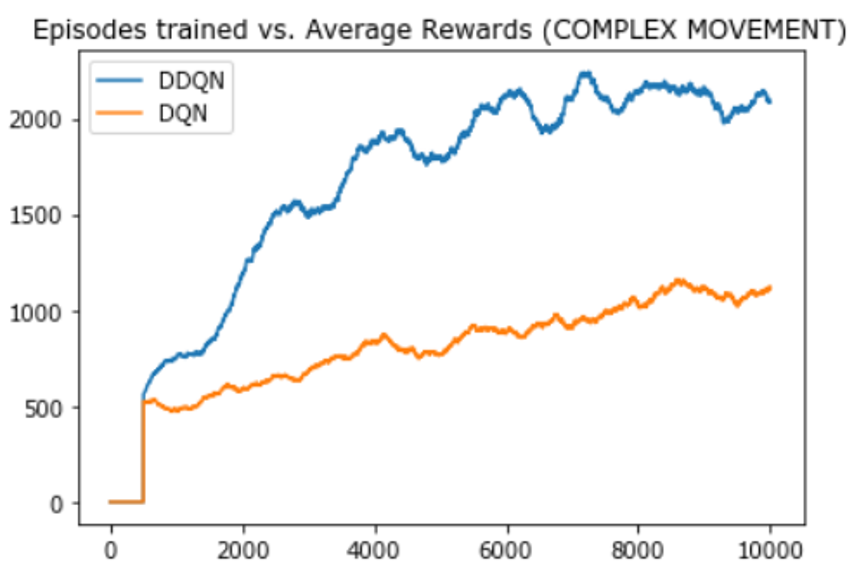
Experiment 1
The first experiment conducted was to compare DDQN and DQN algorithms for the complex movement of the agent.
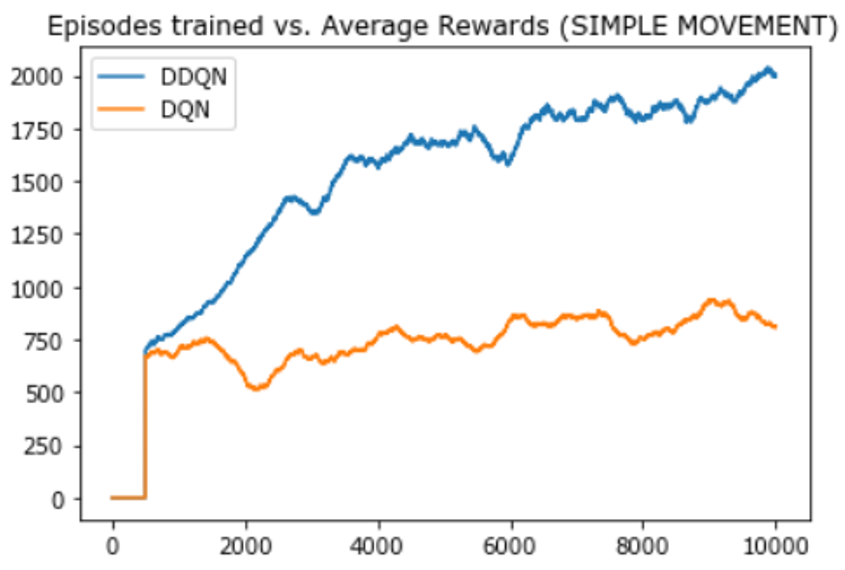
Experiment 2
The second experiment conducted was to compare DDQN and DQN algorithms for the simple movement of the agent.
Experiment 3
The third experiment conducted was to compare DDQN and DQN algorithms for right only movement of the agent.
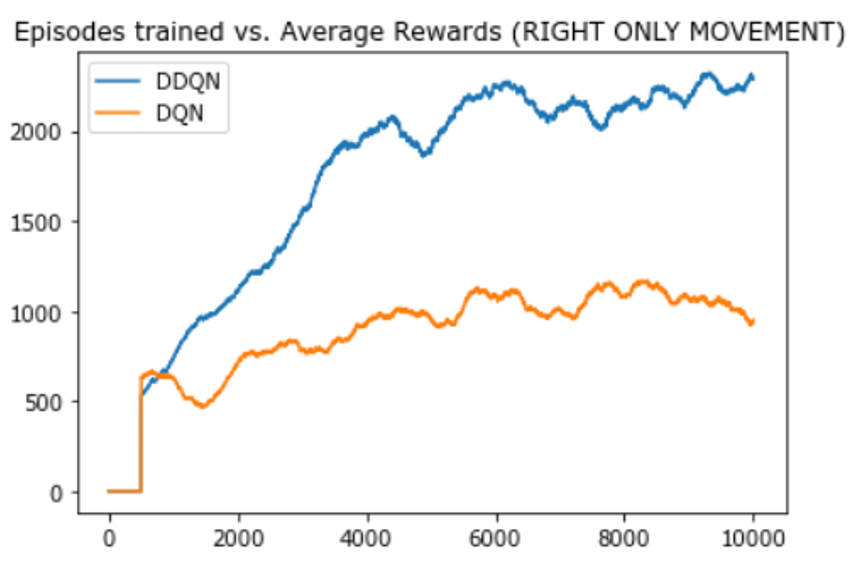
From the above 3 experiment results, we can see that in all cases, DQN’s performance at episode 10,000 is approximately the same as DDQN’s performance at episode 2,000. So, we can conclude that the DDQN network helps to eliminate the overestimation problem caused by the DQN network.
A further experiment conducted using DDQN and DQN for the 3 different movements.
Experiment 4
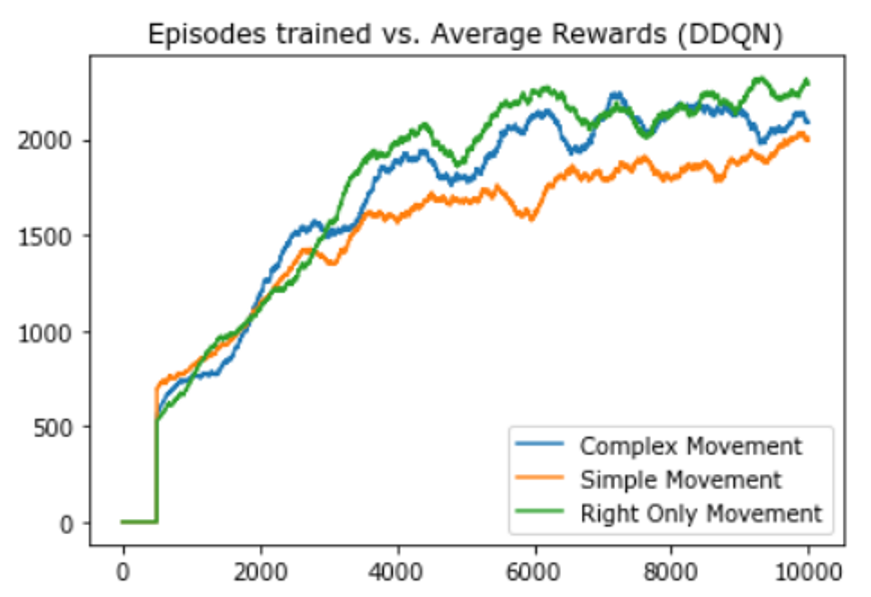
The fourth experiment conducted was using the DDQN algorithm on all 3 different movements.
Experiment 5
The fifth experiment conducted was using the DQN algorithm on all 3 different movements
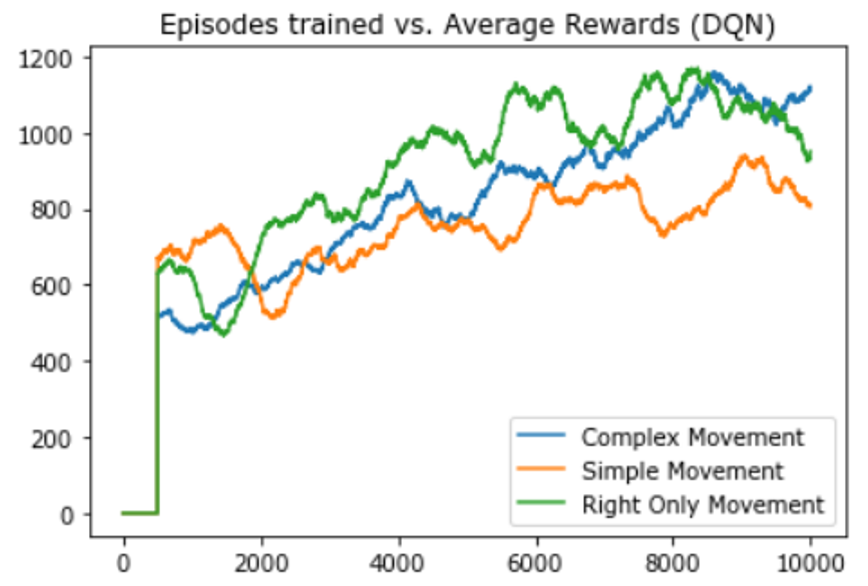
From the above 2 experiment results, we can conclude that the network is able to train better on right-only movement action space which only allows the agent to move to the right.
Codes
import torch
import torch.nn as nn
import random
from nes_py.wrappers import JoypadSpace
import gym_super_mario_bros
from tqdm import tqdm
import pickle
from gym_super_mario_bros.actions import RIGHT_ONLY, SIMPLE_MOVEMENT, COMPLEX_MOVEMENT
import gym
import numpy as np
import collections
import cv2
import matplotlib.pyplot as plt
%matplotlib inline
import time
import pylab as pl
from IPython import display
class MaxAndSkipEnv(gym.Wrapper):
"""
Each action of the agent is repeated over skip frames
return only every `skip`-th frame
"""
def __init__(self, env=None, skip=4):
super(MaxAndSkipEnv, self).__init__(env)
# most recent raw observations (for max pooling across time steps)
self._obs_buffer = collections.deque(maxlen=2)
self._skip = skip
def step(self, action):
total_reward = 0.0
done = None
for _ in range(self._skip):
obs, reward, done, info = self.env.step(action)
self._obs_buffer.append(obs)
total_reward += reward
if done:
break
max_frame = np.max(np.stack(self._obs_buffer), axis=0)
return max_frame, total_reward, done, info
def reset(self):
"""Clear past frame buffer and init to first obs"""
self._obs_buffer.clear()
obs = self.env.reset()
self._obs_buffer.append(obs)
return obs
class MarioRescale84x84(gym.ObservationWrapper):
"""
Downsamples/Rescales each frame to size 84x84 with greyscale
"""
def __init__(self, env=None):
super(MarioRescale84x84, self).__init__(env)
self.observation_space = gym.spaces.Box(low=0, high=255, shape=(84, 84, 1), dtype=np.uint8)
def observation(self, obs):
return MarioRescale84x84.process(obs)
@staticmethod
def process(frame):
if frame.size == 240 * 256 * 3:
img = np.reshape(frame, [240, 256, 3]).astype(np.float32)
else:
assert False, "Unknown resolution."
# image normalization on RBG
img = img[:, :, 0] * 0.299 + img[:, :, 1] * 0.587 + img[:, :, 2] * 0.114
resized_screen = cv2.resize(img, (84, 110), interpolation=cv2.INTER_AREA)
x_t = resized_screen[18:102, :]
x_t = np.reshape(x_t, [84, 84, 1])
return x_t.astype(np.uint8)
class ImageToPyTorch(gym.ObservationWrapper):
"""
Each frame is converted to PyTorch tensors
"""
def __init__(self, env):
super(ImageToPyTorch, self).__init__(env)
old_shape = self.observation_space.shape
self.observation_space = gym.spaces.Box(low=0.0, high=1.0, shape=(old_shape[-1], old_shape[0], old_shape[1]), dtype=np.float32)
def observation(self, observation):
return np.moveaxis(observation, 2, 0)
class BufferWrapper(gym.ObservationWrapper):
"""
Only every k-th frame is collected by the buffer
"""
def __init__(self, env, n_steps, dtype=np.float32):
super(BufferWrapper, self).__init__(env)
self.dtype = dtype
old_space = env.observation_space
self.observation_space = gym.spaces.Box(old_space.low.repeat(n_steps, axis=0),
old_space.high.repeat(n_steps, axis=0), dtype=dtype)
def reset(self):
self.buffer = np.zeros_like(self.observation_space.low, dtype=self.dtype)
return self.observation(self.env.reset())
def observation(self, observation):
self.buffer[:-1] = self.buffer[1:]
self.buffer[-1] = observation
return self.buffer
class PixelNormalization(gym.ObservationWrapper):
"""
Normalize pixel values in frame --> 0 to 1
"""
def observation(self, obs):
return np.array(obs).astype(np.float32) / 255.0
def create_mario_env(env):
env = MaxAndSkipEnv(env)
env = MarioRescale84x84(env)
env = ImageToPyTorch(env)
env = BufferWrapper(env, 4)
env = PixelNormalization(env)
return JoypadSpace(env, SIMPLE_MOVEMENT)
class DQNSolver(nn.Module):
"""
Convolutional Neural Net with 3 conv layers and two linear layers
"""
def __init__(self, input_shape, n_actions):
super(DQNSolver, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(input_shape[0], 32, kernel_size=8, stride=4),
nn.ReLU(),
nn.Conv2d(32, 64, kernel_size=4, stride=2),
nn.ReLU(),
nn.Conv2d(64, 64, kernel_size=3, stride=1),
nn.ReLU()
)
conv_out_size = self._get_conv_out(input_shape)
self.fc = nn.Sequential(
nn.Linear(conv_out_size, 512),
nn.ReLU(),
nn.Linear(512, n_actions)
)
def _get_conv_out(self, shape):
o = self.conv(torch.zeros(1, *shape))
return int(np.prod(o.size()))
def forward(self, x):
conv_out = self.conv(x).view(x.size()[0], -1)
return self.fc(conv_out)
class DQNAgent:
def __init__(self, state_space, action_space, max_memory_size, batch_size, gamma, lr,
dropout, exploration_max, exploration_min, exploration_decay, double_dqn, pretrained):
# Define DQN Layers
self.state_space = state_space
self.action_space = action_space
self.double_dqn = double_dqn
self.pretrained = pretrained
self.device = 'cuda' if torch.cuda.is_available() else 'cpu'
# Double DQN network
if self.double_dqn:
self.local_net = DQNSolver(state_space, action_space).to(self.device)
self.target_net = DQNSolver(state_space, action_space).to(self.device)
if self.pretrained:
self.local_net.load_state_dict(torch.load("DQN1.pt", map_location=torch.device(self.device)))
self.target_net.load_state_dict(torch.load("DQN2.pt", map_location=torch.device(self.device)))
self.optimizer = torch.optim.Adam(self.local_net.parameters(), lr=lr)
self.copy = 5000 # Copy the local model weights into the target network every 5000 steps
self.step = 0
# DQN network
else:
self.dqn = DQNSolver(state_space, action_space).to(self.device)
if self.pretrained:
self.dqn.load_state_dict(torch.load("DQN.pt", map_location=torch.device(self.device)))
self.optimizer = torch.optim.Adam(self.dqn.parameters(), lr=lr)
# Create memory
self.max_memory_size = max_memory_size
if self.pretrained:
self.STATE_MEM = torch.load("STATE_MEM.pt")
self.ACTION_MEM = torch.load("ACTION_MEM.pt")
self.REWARD_MEM = torch.load("REWARD_MEM.pt")
self.STATE2_MEM = torch.load("STATE2_MEM.pt")
self.DONE_MEM = torch.load("DONE_MEM.pt")
with open("ending_position.pkl", 'rb') as f:
self.ending_position = pickle.load(f)
with open("num_in_queue.pkl", 'rb') as f:
self.num_in_queue = pickle.load(f)
else:
self.STATE_MEM = torch.zeros(max_memory_size, *self.state_space)
self.ACTION_MEM = torch.zeros(max_memory_size, 1)
self.REWARD_MEM = torch.zeros(max_memory_size, 1)
self.STATE2_MEM = torch.zeros(max_memory_size, *self.state_space)
self.DONE_MEM = torch.zeros(max_memory_size, 1)
self.ending_position = 0
self.num_in_queue = 0
self.memory_sample_size = batch_size
# Learning parameters
self.gamma = gamma
self.l1 = nn.SmoothL1Loss().to(self.device) # Also known as Huber loss
self.exploration_max = exploration_max
self.exploration_rate = exploration_max
self.exploration_min = exploration_min
self.exploration_decay = exploration_decay
def remember(self, state, action, reward, state2, done):
"""Store the experiences in a buffer to use later"""
self.STATE_MEM[self.ending_position] = state.float()
self.ACTION_MEM[self.ending_position] = action.float()
self.REWARD_MEM[self.ending_position] = reward.float()
self.STATE2_MEM[self.ending_position] = state2.float()
self.DONE_MEM[self.ending_position] = done.float()
self.ending_position = (self.ending_position + 1) % self.max_memory_size # FIFO tensor
self.num_in_queue = min(self.num_in_queue + 1, self.max_memory_size)
def batch_experiences(self):
"""Randomly sample 'batch size' experiences"""
idx = random.choices(range(self.num_in_queue), k=self.memory_sample_size)
STATE = self.STATE_MEM[idx]
ACTION = self.ACTION_MEM[idx]
REWARD = self.REWARD_MEM[idx]
STATE2 = self.STATE2_MEM[idx]
DONE = self.DONE_MEM[idx]
return STATE, ACTION, REWARD, STATE2, DONE
def act(self, state):
"""Epsilon-greedy action"""
if self.double_dqn:
self.step += 1
if random.random() < self.exploration_rate:
return torch.tensor([[random.randrange(self.action_space)]])
if self.double_dqn:
# Local net is used for the policy
return torch.argmax(self.local_net(state.to(self.device))).unsqueeze(0).unsqueeze(0).cpu()
else:
return torch.argmax(self.dqn(state.to(self.device))).unsqueeze(0).unsqueeze(0).cpu()
def copy_model(self):
"""Copy local net weights into target net for DDQN network"""
self.target_net.load_state_dict(self.local_net.state_dict())
def experience_replay(self):
"""Use the double Q-update or Q-update equations to update the network weights"""
if self.double_dqn and self.step % self.copy == 0:
self.copy_model()
if self.memory_sample_size > self.num_in_queue:
return
# Sample a batch of experiences
STATE, ACTION, REWARD, STATE2, DONE = self.batch_experiences()
STATE = STATE.to(self.device)
ACTION = ACTION.to(self.device)
REWARD = REWARD.to(self.device)
STATE2 = STATE2.to(self.device)
DONE = DONE.to(self.device)
self.optimizer.zero_grad()
if self.double_dqn:
# Double Q-Learning target is Q*(S, A) <- r + γ max_a Q_target(S', a)
target = REWARD + torch.mul((self.gamma * self.target_net(STATE2).max(1).values.unsqueeze(1)), 1 - DONE)
current = self.local_net(STATE).gather(1, ACTION.long()) # Local net approximation of Q-value
else:
# Q-Learning target is Q*(S, A) <- r + γ max_a Q(S', a)
target = REWARD + torch.mul((self.gamma * self.dqn(STATE2).max(1).values.unsqueeze(1)), 1 - DONE)
current = self.dqn(STATE).gather(1, ACTION.long())
loss = self.l1(current, target)
loss.backward() # Compute gradients
self.optimizer.step() # Backpropagate error
self.exploration_rate *= self.exploration_decay
# Makes sure that exploration rate is always at least 'exploration min'
self.exploration_rate = max(self.exploration_rate, self.exploration_min)
def show_state(env, ep=0, info=""):
"""While testing show the mario playing environment"""
plt.figure(3)
plt.clf()
plt.imshow(env.render(mode='rgb_array'))
plt.title("Episode: %d %s" % (ep, info))
plt.axis('off')
display.clear_output(wait=True)
display.display(plt.gcf())
def run(training_mode, pretrained, double_dqn, num_episodes=1000, exploration_max=1):
env = gym_super_mario_bros.make('SuperMarioBros-1-1-v0')
env = create_mario_env(env) # Wraps the environment so that frames are grayscale
observation_space = env.observation_space.shape
action_space = env.action_space.n
agent = DQNAgent(state_space=observation_space,
action_space=action_space,
max_memory_size=30000,
batch_size=32,
gamma=0.90,
lr=0.00025,
dropout=0.2,
exploration_max=1.0,
exploration_min=0.02,
exploration_decay=0.99,
double_dqn=double_dqn,
pretrained=pretrained)
# Restart the enviroment for each episode
num_episodes = num_episodes
env.reset()
total_rewards = []
if training_mode and pretrained:
with open("total_rewards.pkl", 'rb') as f:
total_rewards = pickle.load(f)
for ep_num in tqdm(range(num_episodes)):
state = env.reset()
state = torch.Tensor([state])
total_reward = 0
steps = 0
while True:
if not training_mode:
show_state(env, ep_num)
action = agent.act(state)
steps += 1
state_next, reward, terminal, info = env.step(int(action[0]))
total_reward += reward
state_next = torch.Tensor([state_next])
reward = torch.tensor([reward]).unsqueeze(0)
terminal = torch.tensor([int(terminal)]).unsqueeze(0)
if training_mode:
agent.remember(state, action, reward, state_next, terminal)
agent.experience_replay()
state = state_next
if terminal:
break
total_rewards.append(total_reward)
if ep_num != 0 and ep_num % 100 == 0:
print("Episode {} score = {}, average score = {}".format(ep_num + 1, total_rewards[-1], np.mean(total_rewards)))
num_episodes += 1
print("Episode {} score = {}, average score = {}".format(ep_num + 1, total_rewards[-1], np.mean(total_rewards)))
# Save the trained memory so that we can continue from where we stop using 'pretrained' = True
if training_mode:
with open("ending_position.pkl", "wb") as f:
pickle.dump(agent.ending_position, f)
with open("num_in_queue.pkl", "wb") as f:
pickle.dump(agent.num_in_queue, f)
with open("total_rewards.pkl", "wb") as f:
pickle.dump(total_rewards, f)
if agent.double_dqn:
torch.save(agent.local_net.state_dict(), "DQN1.pt")
torch.save(agent.target_net.state_dict(), "DQN2.pt")
else:
torch.save(agent.dqn.state_dict(), "DQN.pt")
torch.save(agent.STATE_MEM, "STATE_MEM.pt")
torch.save(agent.ACTION_MEM, "ACTION_MEM.pt")
torch.save(agent.REWARD_MEM, "REWARD_MEM.pt")
torch.save(agent.STATE2_MEM, "STATE2_MEM.pt")
torch.save(agent.DONE_MEM, "DONE_MEM.pt")
env.close()
# For training
run(training_mode=True, pretrained=False, double_dqn=True, num_episodes=1, exploration_max = 1)
# For Testing
run(training_mode=False, pretrained=True, double_dqn=True, num_episodes=1, exploration_max = 0.05)
Conclusion
DDQN takes much less episode to train in comparison with DQN. Thus, the DDQN network helps to eliminate overestimation issues found in the DQN network. Both DQN and DDQN networks are able to train better on right-only movement compared to simple & complex movement action space.
About the Author
Connect with me on LinkedIn Here.
Thanks for giving your time!
The media shown in this article are not owned by Analytics Vidhya and are used at the Author’s discretion.



Great blog! Thank you so much! Can you suggest possible approaches to further extend this project? Thanks!