This article explores the implementation of Recurrent Neural Networks Python (RNNs) for sequence prediction using Python and NumPy. We’ll focus on predicting sine wave data to understand RNN structure and functionality. The RNN tutorial covers data preparation, model architecture design, and the training process, including forward passes and backpropagation through time. We’ll also address common challenges like the exploding gradient problem. By the end, you’ll have a practical understanding of RNNs and their application to sequence data, preparing you for more advanced topics in deep learning.
Learning Objectives:
- Understand the basic structure and functionality of Recurrent Neural Networks (RNNs)
- Learn to RNN implementation from scratch using Python and NumPy
- Grasp the concept of sequence prediction using sine wave data
- Recognize the steps involved in training an RNN, including forward pass and backpropagation
This article assumes a basic understanding of python recurrent neural networks. In case you need a quick refresher or are looking to learn the basics of RNN, I recommend going through the below articles first:
Table of contents
Flashback: A Recap of Recurrent Neural Network Concepts
Let’s quickly recap the core concepts behind python recurrent neural networks.
We’ll do this using an example of sequence data, say the stocks of a particular firm. A simple machine learning model, or an Artificial Neural Network, may learn to predict the stock price based on a number of features, such as the volume of the stock, the opening value, etc. Apart from these, the price also depends on how the stock fared in the previous fays and weeks. For a trader, this historical data is actually a major deciding factor for making predictions.
In conventional feed-forward neural networks, all test cases are considered to be independent. Can you see how that’s a bad fit when predicting stock prices? The RNN model would not consider the previous stock price values – not a great idea!
There is another concept we can lean on when faced with time sensitive data – Python Recurrent Neural Networks (RNN)!
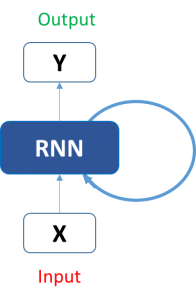
A typical RNN looks like this:
This may seem intimidating at first. But once we unfold it, things start looking a lot simpler:
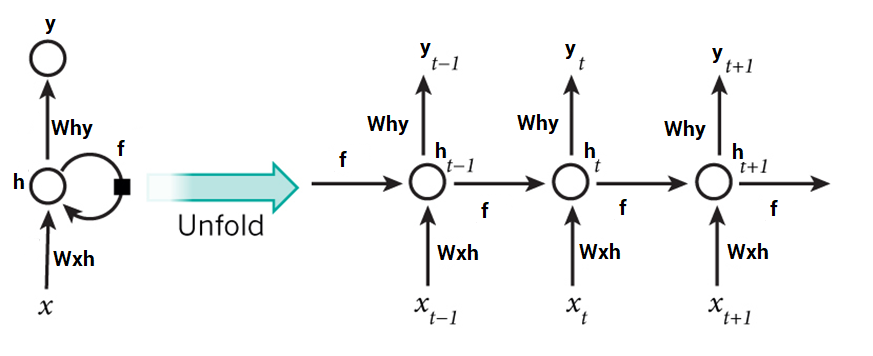
It is now easier for us to visualize how these networks are considering the trend of stock prices. This helps us in predicting the prices for the day. Here, every prediction at time t (h_t) is dependent on all previous predictions and the information learned from them. Fairly straightforward, right?
RNNs can solve our purpose of sequence handling to a great extent but not entirely.
Text is another good example of sequence data. Being able to predict what word or phrase comes after a given text could be a very useful asset. We want our models to write Shakespearean sonnets!
Now, RNNs are great when it comes to context that is short or small in nature. But in order to be able to build a story and remember it, our models should be able to understand the context behind the sequences, just like a human brain.
Sequence Prediction using RNN
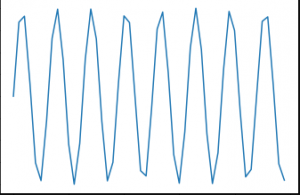
In this article, we will work on a sequence prediction problem using RNN. One of the simplest tasks for this is sine wave prediction. The sequence contains a visible trend and is easy to solve using heuristics. This is what a sine wave looks like:
We will first devise a RNN implementation from scratch to solve this problem. Our RNN model should also be able to generalize well so we can apply it on other sequence problems.
We will formulate our problem like this – given a sequence of 50 numbers belonging to a sine wave, predict the 51st number in the series. Time to fire up your Jupyter notebook (or your IDE of choice)!
Checkout this article about the Machine Learning Projects for Beginners in 2025
Coding RNN using Python
Step 1: Data Preparation
Ah, the inevitable first step in any data science project – preparing the data before we do anything else.
What does our network model expect the data to be like? It would accept a single sequence of length 50 as input. So the shape of the input data will be:
(number_of_records x length_of_sequence x types_of_sequences)Here, types_of_sequences is 1, because we have only one type of sequence – the sine wave.
On the other hand, the output would have only one value for each record. This will of course be the 51st value in the input sequence. So it’s shape would be:
(number_of_records x types_of_sequences) #where types_of_sequences is 1Let’s dive into the code. First, import the necessary libraries:
%pylab inline
import mathTo create a sine wave like data, we will use the sine function from Python’s math library:
sin_wave = np.array([math.sin(x) for x in np.arange(200)])Visualizing the sine wave we’ve just generated:
plt.plot(sin_wave[:50])We will create the data now in the below code block and print the shape of the data:
Python Code:
import numpy as np
import math
sin_wave = np.array([math.sin(x) for x in np.arange(200)])
X = []
Y = []
seq_len = 50
num_records = len(sin_wave) - seq_len
for i in range(num_records - 50):
X.append(sin_wave[i:i+seq_len])
Y.append(sin_wave[i+seq_len])
X = np.array(X)
X = np.expand_dims(X, axis=2)
Y = np.array(Y)
Y = np.expand_dims(Y, axis=1)
print(X.shape,Y.shape)Note that we looped for (num_records – 50) because we want to set aside 50 records as our validation data. We can create this validation data now:
X_val = []
Y_val = []
for i in range(num_records - 50, num_records):
X_val.append(sin_wave[i:i+seq_len])
Y_val.append(sin_wave[i+seq_len])
X_val = np.array(X_val)
X_val = np.expand_dims(X_val, axis=2)
Y_val = np.array(Y_val)
Y_val = np.expand_dims(Y_val, axis=1)Step 1: Create the Architecture for our RNN model
Our next task is defining all the necessary variables and functions we’ll use in the Python RNN model. Our model will take in the input sequence, process it through a hidden layer of 100 units, and produce a single valued output:
learning_rate = 0.0001
nepoch = 25
T = 50 # length of sequence
hidden_dim = 100
output_dim = 1
bptt_truncate = 5
min_clip_value = -10
max_clip_value = 10We will then define the weights of the network:
U = np.random.uniform(0, 1, (hidden_dim, T))
W = np.random.uniform(0, 1, (hidden_dim, hidden_dim))
V = np.random.uniform(0, 1, (output_dim, hidden_dim))Here,
- U is the weight matrix for weights between input and hidden layers
- V is the weight matrix for weights between hidden and output layers
- W is the weight matrix for shared weights in the RNN layer (hidden layer)
Finally, we will define the activation function, sigmoid, to be used in the hidden layer:
def sigmoid(x):
return 1 / (1 + np.exp(-x))Step 2: Train the Model
Step 2.1: Check the loss on training data
We will do a forward pass through our RNN model and calculate the squared error for the predictions for all records in order to get the loss value.
for epoch in range(nepoch):
# check loss on train
loss = 0.0
# do a forward pass to get prediction
for i in range(Y.shape[0]):
x, y = X[i], Y[i] # get input, output values of each record
prev_s = np.zeros((hidden_dim, 1)) # here, prev-s is the value of the previous activation of hidden layer; which is initialized as all zeroes
for t in range(T):
new_input = np.zeros(x.shape) # we then do a forward pass for every timestep in the sequence
new_input[t] = x[t] # for this, we define a single input for that timestep
mulu = np.dot(U, new_input)
mulw = np.dot(W, prev_s)
add = mulw + mulu
s = sigmoid(add)
mulv = np.dot(V, s)
prev_s = s
# calculate error
loss_per_record = (y - mulv)**2 / 2
loss += loss_per_record
loss = loss / float(y.shape[0])Step 2.2: Check the loss on validation data
We will do the same thing for calculating the loss on validation data (in the same loop):
# check loss on val
val_loss = 0.0
for i in range(Y_val.shape[0]):
x, y = X_val[i], Y_val[i]
prev_s = np.zeros((hidden_dim, 1))
for t in range(T):
new_input = np.zeros(x.shape)
new_input[t] = x[t]
mulu = np.dot(U, new_input)
mulw = np.dot(W, prev_s)
add = mulw + mulu
s = sigmoid(add)
mulv = np.dot(V, s)
prev_s = s
loss_per_record = (y - mulv)**2 / 2
val_loss += loss_per_record
val_loss = val_loss / float(y.shape[0])
print('Epoch: ', epoch + 1, ', Loss: ', loss, ', Val Loss: ', val_loss)You should get the below output:
Epoch: 1 , Loss: [[101185.61756671]] , Val Loss: [[50591.0340148]]
...
...Step 2.3: Start actual training
We will now start with the actual training of the network. In this, we will first do a forward pass to calculate the errors and a backward pass to calculate the gradients and update them. Let me show you these step-by-step so you can visualize how it works in your mind.
Step 2.3.1: Forward Pass
In the forward pass:
- We first multiply the input with the weights between input and hidden layers
- Add this with the multiplication of weights in the Python RNN layer. This is because we want to capture the knowledge of the previous timestep
- Pass it through a sigmoid activation function
- Multiply this with the weights between hidden and output layers
- At the output layer, we have a linear activation of the values so we do not explicitly pass the value through an activation layer
- Save the state at the current layer and also the state at the previous timestep in a dictionary
Read about this article on Activation Functions in Neural Network
Here is the code for doing a forward pass (note that it is in continuation of the above loop):
# train model
for i in range(Y.shape[0]):
x, y = X[i], Y[i]
layers = []
prev_s = np.zeros((hidden_dim, 1))
dU = np.zeros(U.shape)
dV = np.zeros(V.shape)
dW = np.zeros(W.shape)
dU_t = np.zeros(U.shape)
dV_t = np.zeros(V.shape)
dW_t = np.zeros(W.shape)
dU_i = np.zeros(U.shape)
dW_i = np.zeros(W.shape)
# forward pass
for t in range(T):
new_input = np.zeros(x.shape)
new_input[t] = x[t]
mulu = np.dot(U, new_input)
mulw = np.dot(W, prev_s)
add = mulw + mulu
s = sigmoid(add)
mulv = np.dot(V, s)
layers.append({'s':s, 'prev_s':prev_s})
prev_s = s
Step 2.3.2 : Backpropagate Error
After the forward propagation step, we calculate the gradients at each layer, and backpropagate the errors. We will use truncated back propagation through time (TBPTT), instead of vanilla backprop. It may sound complex but its actually pretty straight forward.
The core difference in BPTT versus backprop is that the backpropagation step is done for all the time steps in the RNN layer. So if our sequence length is 50, we will backpropagate for all the timesteps previous to the current timestep.
If you have guessed correctly, BPTT seems very computationally expensive. So instead of backpropagating through all previous timestep , we backpropagate till x timesteps to save computational power. Consider this ideologically similar to stochastic gradient descent, where we include a batch of data points instead of all the data points.
Here is the code for backpropagating the errors:
# derivative of pred
dmulv = (mulv - y)
# backward pass
for t in range(T):
dV_t = np.dot(dmulv, np.transpose(layers[t]['s']))
dsv = np.dot(np.transpose(V), dmulv)
ds = dsv
dadd = add * (1 - add) * ds
dmulw = dadd * np.ones_like(mulw)
dprev_s = np.dot(np.transpose(W), dmulw)
for i in range(t-1, max(-1, t-bptt_truncate-1), -1):
ds = dsv + dprev_s
dadd = add * (1 - add) * ds
dmulw = dadd * np.ones_like(mulw)
dmulu = dadd * np.ones_like(mulu)
dW_i = np.dot(W, layers[t]['prev_s'])
dprev_s = np.dot(np.transpose(W), dmulw)
new_input = np.zeros(x.shape)
new_input[t] = x[t]
dU_i = np.dot(U, new_input)
dx = np.dot(np.transpose(U), dmulu)
dU_t += dU_i
dW_t += dW_i
dV += dV_t
dU += dU_t
dW += dW_tStep 2.3.3 : Update weights
Lastly, we update the weights with the gradients of weights calculated. One thing we have to keep in mind that the gradients tend to explode if you don’t keep them in check.This is a fundamental issue in training neural networks, called the exploding gradient problem. So we have to clamp them in a range so that they dont explode. We can do it like this
if dU.max() > max_clip_value:
dU[dU > max_clip_value] = max_clip_value
if dV.max() > max_clip_value:
dV[dV > max_clip_value] = max_clip_value
if dW.max() > max_clip_value:
dW[dW > max_clip_value] = max_clip_value
if dU.min() < min_clip_value:
dU[dU < min_clip_value] = min_clip_value
if dV.min() < min_clip_value:
dV[dV < min_clip_value] = min_clip_value
if dW.min() < min_clip_value:
dW[dW < min_clip_value] = min_clip_value
# update
U -= learning_rate * dU
V -= learning_rate * dV
W -= learning_rate * dWOn training the above model, we get this output:
Epoch: 1 , Loss: [[101185.61756671]] , Val Loss: [[50591.0340148]]
Epoch: 2 , Loss: [[61205.46869629]] , Val Loss: [[30601.34535365]]
Epoch: 3 , Loss: [[31225.3198258]] , Val Loss: [[15611.65669247]]
Epoch: 4 , Loss: [[11245.17049551]] , Val Loss: [[5621.96780111]]
Epoch: 5 , Loss: [[1264.5157739]] , Val Loss: [[632.02563908]]
Epoch: 6 , Loss: [[20.15654115]] , Val Loss: [[10.05477285]]
Epoch: 7 , Loss: [[17.13622839]] , Val Loss: [[8.55190426]]
Epoch: 8 , Loss: [[17.38870495]] , Val Loss: [[8.68196484]]
Epoch: 9 , Loss: [[17.181681]] , Val Loss: [[8.57837827]]
Epoch: 10 , Loss: [[17.31275313]] , Val Loss: [[8.64199652]]
Epoch: 11 , Loss: [[17.12960034]] , Val Loss: [[8.54768294]]
Epoch: 12 , Loss: [[17.09020065]] , Val Loss: [[8.52993502]]
Epoch: 13 , Loss: [[17.17370113]] , Val Loss: [[8.57517454]]
Epoch: 14 , Loss: [[17.04906914]] , Val Loss: [[8.50658127]]
Epoch: 15 , Loss: [[16.96420184]] , Val Loss: [[8.46794248]]
Epoch: 16 , Loss: [[17.017519]] , Val Loss: [[8.49241316]]
Epoch: 17 , Loss: [[16.94199493]] , Val Loss: [[8.45748739]]
Epoch: 18 , Loss: [[16.99796892]] , Val Loss: [[8.48242177]]
Epoch: 19 , Loss: [[17.24817035]] , Val Loss: [[8.6126231]]
Epoch: 20 , Loss: [[17.00844599]] , Val Loss: [[8.48682234]]
Epoch: 21 , Loss: [[17.03943262]] , Val Loss: [[8.50437328]]
Epoch: 22 , Loss: [[17.01417255]] , Val Loss: [[8.49409597]]
Epoch: 23 , Loss: [[17.20918888]] , Val Loss: [[8.5854792]]
Epoch: 24 , Loss: [[16.92068017]] , Val Loss: [[8.44794633]]
Epoch: 25 , Loss: [[16.76856238]] , Val Loss: [[8.37295808]]Looking good! Time to get the predictions and plot them to get a visual sense of what we’ve designed.
Step 3: Get predictions
We will do a forward pass through the trained weights to get our predictions:
preds = []
for i in range(Y.shape[0]):
x, y = X[i], Y[i]
prev_s = np.zeros((hidden_dim, 1))
# Forward pass
for t in range(T):
mulu = np.dot(U, x)
mulw = np.dot(W, prev_s)
add = mulw + mulu
s = sigmoid(add)
mulv = np.dot(V, s)
prev_s = s
preds.append(mulv)
preds = np.array(preds)Plotting these predictions alongside the actual values:
plt.plot(preds[:, 0, 0], 'g')
plt.plot(Y[:, 0], 'r')
plt.show()
This was on the training data. How do we know if our model didn’t overfit? This is where the validation set, which we created earlier, comes into play:
preds = []
for i in range(Y_val.shape[0]):
x, y = X_val[i], Y_val[i]
prev_s = np.zeros((hidden_dim, 1))
# For each time step...
for t in range(T):
mulu = np.dot(U, x)
mulw = np.dot(W, prev_s)
add = mulw + mulu
s = sigmoid(add)
mulv = np.dot(V, s)
prev_s = s
preds.append(mulv)
preds = np.array(preds)
plt.plot(preds[:, 0, 0], 'g')
plt.plot(Y_val[:, 0], 'r')
plt.show()
Not bad. The predictions are looking impressive. The RMSE score on the validation data is respectable as well:
from sklearn.metrics import mean_squared_error
math.sqrt(mean_squared_error(Y_val[:, 0] * max_val, preds[:, 0, 0] * max_val))
0.127191931509431Conclusion
In this Python RNN tutorial, we’ve built an RNN from scratch to predict sine wave data. We’ve covered the entire process, from data preparation to model evaluation, highlighting key concepts like backpropagation through time and gradient clipping. The implemented model demonstrates impressive performance on both training and validation data, showcasing the power of Python RNNs in handling sequential information. This hands-on experience provides a solid foundation for tackling more complex sequence prediction tasks and exploring advanced RNN architectures in the future.
Key Takeaways:
- RNNs are effective for handling sequence data and maintaining context across time steps
- RNN implementation from scratch involves defining the architecture, forward pass, and backpropagation through time (BPTT)
- Gradient clipping is crucial to prevent the exploding gradient problem in Python RNNs
- Validation data is important to assess the model’s generalization and prevent overfitting
Frequently Asked Questions
Q1. What is recurrent neural network in Python?
A. A recurrent neural network (RNN) in Python is a type of neural network designed for processing sequential data by using loops within the network to maintain information from previous inputs.
Q2.What is RNN with example?
An RNN processes sequences of data, such as time series or text. For example, an RNN can predict the next word in a sentence by maintaining a context of previously seen words.
Q3.What is the difference between CNN and RNN in Python?
CNNs (Convolutional Neural Networks) excel at spatial data like images, using convolutional layers to capture spatial hierarchies. RNNs (Recurrent Neural Networks) are designed for sequential data, using recurrent layers to maintain temporal dependencies.
Q4. What is the difference between RNN and LSTM?
RNNs process sequential data but struggle with long-term memory. LSTMs solve this with memory cells and gates, making them better for long sequences.
Q5. What is RNN and Why Is It Used?
RNNs are neural networks for sequential data, remembering past inputs. They are used in tasks like language processing and time-series forecasting.
Faizan is a Data Science enthusiast and a Deep learning rookie. A recent Comp. Sc. undergrad, he aims to utilize his skills to push the boundaries of AI research.



Great article! How would the code need to be modified if more than one time series are used to make a prediction? For example: - predict next day temperature using the last 50-day temperature and last 50-day humidity level; or, - predict next day temperature and next day humidity level using the last 50-day temperature and last 50-day humidity level Thank you, Guy Aubin
Hi, As the data for both the tasks, i.e. predicting temperature and predicting humidity, will be different, I would suggest to build two different models, one for temperature and one for humidity.
This article is useful! But there is a little question I want to ask. In the last cell, 'math.sqrt(mean_squared_error(Y_val[:, 0] * max_val, preds[:, 0, 0] * max_val))' The object 'max_val' seems not be defined in the above code. What is the value(or meaning) of 'max_val'? Thank you!
Hi, Thanks for a great note. I am getting an error while running the code. The error is coming from the last line. -->math.sqrt(mean_squared_error(Y_val[:, 0] * max_val, preds[:, 0, 0] * max_val)) How did you define "max_val" here?